Vehicles with automated parking functions have to be precisely localized in unknown environments to ensure safety. To this end, we developed precise localization algorithms based on camera, radar, and odometer sensor data.

Vehicle localization is a prerequisite for automated and autonomous driving functions. The vehicle has to ‘know’ its environment to safely find its way around. The challenge was to use camera, radar, and odometer sensor data to enable very precise vehicle localization in an unknown environment for an automatic parking function. When the vehicle travels the same path again, the system has to be able to recognize that path, compare the changing environment to the stored map of this environment, and navigate it automatically.

GPS data is not always precise. For example, the signal may not penetrate to underground garages. However, a reliable ground truth is necessary to assess the localization system’s performance. This means engineers have to define a dependable way of accurately localizing the vehicle based on its automated driving function’s use cases.
We rose to this challenge by developing sophisticated algorithms that compare the stored map of the environment with current data. Weather conditions, other road users, and objects can change the environment and therefore impact the vehicle’s motion planning.
Fusion algorithms draw on the strengths of one sensor system to compensate for the weaknesses of another. We used plausibility algorithms to identify inaccurate sensor readings and omit these data to prevent their further processing downstream. A high-performance debugging and development framework enabled us to develop and debug localization components in a targeted and isolated manner. Our engineers also defined a reference system suitable for acquiring real ground truth data and selected a laser tracker for this purpose.
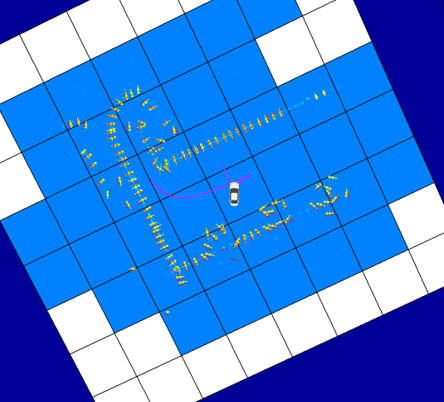
A simulation can serve to compare environmental data. Overlapping yellow and red arrows indicate a perfect match of current and stored environmental data.
The outcome of these efforts is a radar-based localization framework that can be supplemented with camera, GPS, and odometer sensor data. To contain complexity, we combined different approaches to localization and tested the results with simulations. The team accelerated the development process by efficiently re-simulating the target software with Python scripting. This way, we were able to immediately render and optimize simulation results. CI/CD-based agile software development kept our options open and flexible throughout the project.
Jochen Breidt
Automated Mobility
Get in touch with us. Your personal contact is:

Jochen Breidt
Automated Mobility
* Mandatory fields